Caros colegas.
Estou fazendo um sistema de monitoração e controle de diversos parâmetros de uma embarcação, apenas para o meu uso pessoal. Dentre eles se encontra o de monitorar e acionar um leme de acordo com uma determinada direção magnética. Por exemplo, navegar com uma rota de 30 graus magnéticos.
Realmente acredito que saiba fazer esta tarefa, porém, o problema é fazê-la de uma maneira que considere a relação custo/benefício. Acho que não adianta apenas saber fazer, tem que fazer com eficiência e simplicidade.
Baseada nesta diretiva, pesquisei na internet sensores a efeito Hall, mas a sensibilidade que achei era bem pequena. Teria que amplificar um sinal contínuo de, no máximo, cerca de 50 micro volts. Este nível de sinal requer um bom amplificador operacional, e além disso, um circuito com ajuste automático de zero para compensar o nível de offset e outros detalhes. O meu sistema está crescendo assustadoramente, tive que migrar do 16F628 para o 16F877 e já estou utilizando todos os pinos disponíveis.
Pensei em algo mais sensível, como aplicar um campo magnético em uma bússola, de modo a ter uma corrente de bobina (na realidade são duas) como função da direção da embarcação. Apesar desta solução ser sensível, esbarrei com problemas mecânicos, pois teria que saber (eletricamente) quando a bússola apontasse para uma determinada direção. Outro problema é que esta função segue uma relação de tangente do ângulo, o que provoca grandes erros para ângulos superiores a 60 graus.
Finalmente minha questão é a seguinte:
Alguém teria alguma informação para que eu pudesse pesquisar mais sobre o assunto?
Grato.
MOR_AL
Fórum sobre desenvolvimento de sistemas embarcados: Hardware e Software, Tecnologias: Eletrônica digital e analógica, Microcontroladoras, Microprocessadores, Sistemas *NIX (Linux, BSD), Software embarcado Baremetal. Sem fins lucrativos.
Navegação baseada no magnetismo terrestre
8 mensagens
• Página 1 de 1
Navegação baseada no magnetismo terrestre
![]() por MOR_AL » 28 Out 2007 13:18
por MOR_AL » 28 Out 2007 13:18
"Para o triunfo do mal só é preciso que os bons homens não façam nada." Edmund Burke.
"Nunca discutas com pessoas estúpidas. Elas irão te arrastar ao nível delas e vencê-lo por possuir mais experiência em ser ignorante". Mark Twain
"Nunca discutas com pessoas estúpidas. Elas irão te arrastar ao nível delas e vencê-lo por possuir mais experiência em ser ignorante". Mark Twain
-

MOR_AL - Dword
- Mensagens: 2940
- Registrado em: 19 Out 2006 09:38
- Localização: Rio de Janeiro - RJ
Re: Navegação baseada no magnetismo terrestre
![]() por Jorge_Francisco » 29 Out 2007 12:21
por Jorge_Francisco » 29 Out 2007 12:21
MOR_AL escreveu:Caros colegas.
Estou fazendo um sistema de monitoração e controle de diversos parâmetros de uma embarcação, apenas para o meu uso pessoal. Dentre eles se encontra o de monitorar e acionar um leme de acordo com uma determinada direção magnética. Por exemplo, navegar com uma rota de 30 graus magnéticos.
Realmente acredito que saiba fazer esta tarefa, porém, o problema é fazê-la de uma maneira que considere a relação custo/benefício. Acho que não adianta apenas saber fazer, tem que fazer com eficiência e simplicidade.
Baseada nesta diretiva, pesquisei na internet sensores a efeito Hall, mas a sensibilidade que achei era bem pequena. Teria que amplificar um sinal contínuo de, no máximo, cerca de 50 micro volts. Este nível de sinal requer um bom amplificador operacional, e além disso, um circuito com ajuste automático de zero para compensar o nível de offset e outros detalhes. O meu sistema está crescendo assustadoramente, tive que migrar do 16F628 para o 16F877 e já estou utilizando todos os pinos disponíveis.
Pensei em algo mais sensível, como aplicar um campo magnético em uma bússola, de modo a ter uma corrente de bobina (na realidade são duas) como função da direção da embarcação. Apesar desta solução ser sensível, esbarrei com problemas mecânicos, pois teria que saber (eletricamente) quando a bússola apontasse para uma determinada direção. Outro problema é que esta função segue uma relação de tangente do ângulo, o que provoca grandes erros para ângulos superiores a 60 graus.
Finalmente minha questão é a seguinte:
Alguém teria alguma informação para que eu pudesse pesquisar mais sobre o assunto?
Grato.
MOR_AL
Existe Sensor de efeito Hall com sensibilidade de 5mv e range de 0 a 5V, como por exemplo o MX90215 da Melexis. O segundo ponto é que este projeto não daria muito certo pois o campo magnético terrestre não é uniforme, existe um erro no Azimute Magnético. Muitas coisas amplificam este erro como explosões solares, umidade do ar,etc.
Vlw
-

Jorge_Francisco - Dword
- Mensagens: 1009
- Registrado em: 12 Out 2006 09:53
- Localização: Rio de Janeiro
Re: Navegação baseada no magnetismo terrestre
![]() por Jorge_Francisco » 29 Out 2007 12:32
por Jorge_Francisco » 29 Out 2007 12:32
-
Jorge_Francisco - Dword
- Mensagens: 1009
- Registrado em: 12 Out 2006 09:53
- Localização: Rio de Janeiro
![]() por brasilma » 29 Out 2007 13:26
por brasilma » 29 Out 2007 13:26
Dê uma olhada nesta solução: http://www.spectronsensors.com/tilt.html , porem endosso o que os outros colegas já falaram: as linhas magnéticas não são uma referência confiável, seria muito mais preciso um GPS por exemplo.
Abraços,
MArco(s).
Abraços,
MArco(s).
" A Teoria orienta e a Prática decide" 
-

brasilma - Dword
- Mensagens: 3621
- Registrado em: 11 Out 2006 15:39
- Localização: Planeta Terra
![]() por MOR_AL » 29 Out 2007 16:03
por MOR_AL » 29 Out 2007 16:03
Olá Jorge_Francisco. Tudo bem?
Dei uma olhada no Datasheet do sensor Hall MLX215. Sua sensibilidade máxima é de 140mV/mT. Como o campo magnético terrestre máximo vale 0,06mT, a tensão máxima proveniente do sensor seria de:
V_Sens = 140mV/mT * 0,06mT = 8,4mV.
Este valor é bem mais interessante que 50 microVolts. Já é um forte candidato à escolha final. Seu valor já é da ordem de grandeza dos offsets dos amlificadores operacionais comuns. Vou sondar sua disponibilidade e custo.
Valeu mesmo.
Com relação ao outro aspecto, do valor (e direção) do campo magnético terrestre não serem constantes, não teria problema. Apesar de ser Mestre Amador, não pretendo navegar mais pelo litoral brasileiro. Quero ficar aqui no meu "quintal", no litoral do Rio de Janeiro. Para esta condição já seria suficiente. Além do mais, não é normal você marcar uma rota, próxima ao litoral, sem verificar regularmente "se está tudo certo". As cartas náuticas da região apresentam algumas informações sobre a direção do campo magnético no local e sua variação anual.
A intensão é poder deixar o leme o tempo suficiente para tomar uma cerveja descontraído
É isso aí. Sua dica do MLX215 foi muito boa.
Grato
MOR_AL
Dei uma olhada no Datasheet do sensor Hall MLX215. Sua sensibilidade máxima é de 140mV/mT. Como o campo magnético terrestre máximo vale 0,06mT, a tensão máxima proveniente do sensor seria de:
V_Sens = 140mV/mT * 0,06mT = 8,4mV.
Este valor é bem mais interessante que 50 microVolts. Já é um forte candidato à escolha final. Seu valor já é da ordem de grandeza dos offsets dos amlificadores operacionais comuns. Vou sondar sua disponibilidade e custo.
Valeu mesmo.
Com relação ao outro aspecto, do valor (e direção) do campo magnético terrestre não serem constantes, não teria problema. Apesar de ser Mestre Amador, não pretendo navegar mais pelo litoral brasileiro. Quero ficar aqui no meu "quintal", no litoral do Rio de Janeiro. Para esta condição já seria suficiente. Além do mais, não é normal você marcar uma rota, próxima ao litoral, sem verificar regularmente "se está tudo certo". As cartas náuticas da região apresentam algumas informações sobre a direção do campo magnético no local e sua variação anual.
A intensão é poder deixar o leme o tempo suficiente para tomar uma cerveja descontraído
É isso aí. Sua dica do MLX215 foi muito boa.
Grato
MOR_AL
"Para o triunfo do mal só é preciso que os bons homens não façam nada." Edmund Burke.
"Nunca discutas com pessoas estúpidas. Elas irão te arrastar ao nível delas e vencê-lo por possuir mais experiência em ser ignorante". Mark Twain
"Nunca discutas com pessoas estúpidas. Elas irão te arrastar ao nível delas e vencê-lo por possuir mais experiência em ser ignorante". Mark Twain
-
MOR_AL - Dword
- Mensagens: 2940
- Registrado em: 19 Out 2006 09:38
- Localização: Rio de Janeiro - RJ
![]() por MOR_AL » 29 Out 2007 16:35
por MOR_AL » 29 Out 2007 16:35
Olá Brasilma! Tudo bem?
Com relação à dica do site.
Pelo que eu pude entender, o dispositivo é um "inclinômetro", tendo a ver com o ângulo de inclinação, ou seja: geometria e gravidade. Tem que ser alimentado por um sinal AC para obter-se o ângulo de inclinação. Se for realmente isso, não vai me servir, assim mesmo valeu pelo interesse.
Com relação ao GPS você tem toda a razão.
Possuo um modelo de uns 8 anos (o mais comum deles). Ele tem uma programação, via teclado, que você pode colocar uma faixa de navegação. Se a embarcação sair desta faixa, ele aciona um alarme. Ele tem até um conector para "conversar" com o PC. Não me aprofundei neste detalhe por achar ser necessário um notebook. Não sei se seria fácil implementar uma conversa com um PIC.
Antes da sugestão do Jorge_Francisco, eu passei algumas horas tentando uma solução eletromecânica. Esta solução me daria o ângulo de navegação com a mesma precisão em toda sua faixa. Veja a figura:
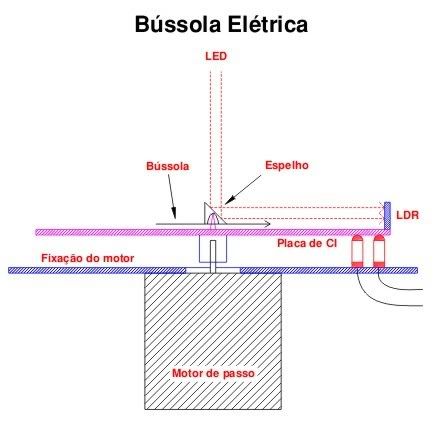
A bússola gira na base que está presa ao eixo de um motor de passo. É necessário saber a referência, ou a posição do eixo do motor no zero magnético.
Gira-se o motor de passo a partir deste zero e monitora-se o LDR. Quando houver "luz do LED", tem-se o norte magnético. Conhecendo-se a "declinação da agulha", tem-se a direção.
É necessário um pino do PIC (analógico ou digital) para monitorar o LDR. Outros dois pinos para acionar o motor de passo.
O problema é que o meu PIC16F877 já está com os seus pinos todos ocupados. Acho que terei que retirar alguma tarefa do PIC.
Valeu pelas dicas Brasilma.
Grato.
MOR_AL
Com relação à dica do site.
Pelo que eu pude entender, o dispositivo é um "inclinômetro", tendo a ver com o ângulo de inclinação, ou seja: geometria e gravidade. Tem que ser alimentado por um sinal AC para obter-se o ângulo de inclinação. Se for realmente isso, não vai me servir, assim mesmo valeu pelo interesse.
Com relação ao GPS você tem toda a razão.
Possuo um modelo de uns 8 anos (o mais comum deles). Ele tem uma programação, via teclado, que você pode colocar uma faixa de navegação. Se a embarcação sair desta faixa, ele aciona um alarme. Ele tem até um conector para "conversar" com o PC. Não me aprofundei neste detalhe por achar ser necessário um notebook. Não sei se seria fácil implementar uma conversa com um PIC.
Antes da sugestão do Jorge_Francisco, eu passei algumas horas tentando uma solução eletromecânica. Esta solução me daria o ângulo de navegação com a mesma precisão em toda sua faixa. Veja a figura:
A bússola gira na base que está presa ao eixo de um motor de passo. É necessário saber a referência, ou a posição do eixo do motor no zero magnético.
Gira-se o motor de passo a partir deste zero e monitora-se o LDR. Quando houver "luz do LED", tem-se o norte magnético. Conhecendo-se a "declinação da agulha", tem-se a direção.
É necessário um pino do PIC (analógico ou digital) para monitorar o LDR. Outros dois pinos para acionar o motor de passo.
O problema é que o meu PIC16F877 já está com os seus pinos todos ocupados. Acho que terei que retirar alguma tarefa do PIC.
Valeu pelas dicas Brasilma.
Grato.
MOR_AL
"Para o triunfo do mal só é preciso que os bons homens não façam nada." Edmund Burke.
"Nunca discutas com pessoas estúpidas. Elas irão te arrastar ao nível delas e vencê-lo por possuir mais experiência em ser ignorante". Mark Twain
"Nunca discutas com pessoas estúpidas. Elas irão te arrastar ao nível delas e vencê-lo por possuir mais experiência em ser ignorante". Mark Twain
-
MOR_AL - Dword
- Mensagens: 2940
- Registrado em: 19 Out 2006 09:38
- Localização: Rio de Janeiro - RJ
![]() por Jorge_Francisco » 29 Out 2007 18:12
por Jorge_Francisco » 29 Out 2007 18:12
O sensor é MLX90215, e sua sensibilidade é de 5mV/Gauss(só olhando o datasheet) ou coisa parecida,rsrsrs.Sobre o GPS, é muito mais confiavel, poderia se comprar um desses módulos que vemos por aí, mas como a coisa não irá pro profissional pode usar este mesmo que vc tem e ligar via serial a um microcontrolador e visualizar a resposta em um lcd.Procure aqui no forum mesmo.
-
Jorge_Francisco - Dword
- Mensagens: 1009
- Registrado em: 12 Out 2006 09:53
- Localização: Rio de Janeiro
![]() por MOR_AL » 31 Out 2007 21:21
por MOR_AL » 31 Out 2007 21:21
Caro Jorge_Francisco.
Realmente é o MLX90215.
Vou procurar no forum a sua dica
Grato
MOR_AL
Realmente é o MLX90215.
Vou procurar no forum a sua dica
Grato
MOR_AL
"Para o triunfo do mal só é preciso que os bons homens não façam nada." Edmund Burke.
"Nunca discutas com pessoas estúpidas. Elas irão te arrastar ao nível delas e vencê-lo por possuir mais experiência em ser ignorante". Mark Twain
"Nunca discutas com pessoas estúpidas. Elas irão te arrastar ao nível delas e vencê-lo por possuir mais experiência em ser ignorante". Mark Twain
-
MOR_AL - Dword
- Mensagens: 2940
- Registrado em: 19 Out 2006 09:38
- Localização: Rio de Janeiro - RJ
8 mensagens
• Página 1 de 1
Voltar para Mecatronica a Automação
Quem está online
Usuários navegando neste fórum: Nenhum usuário registrado e 1 visitante