Neste tópico estou disponibilizando o projeto completo de um robô hexapode baseado nos excelentes kits da Lynxmotion http://www.lynxmotion.com
O projeto é todo baseado na utilização de materiais alternativos e de baixo custo. Os únicos itens mais caros são os servos para modelismo que podem ser comprados ao preço de até 35,00 a unidade em lojas de aeromodelismo ou mesmo no Mercado Livre. Existe também a possibilidade de se tentar adaptar servos de parabólica, mas isso implica em alterações drásticas na estrutura do robô.
Lista de material:
50 cm de cano de PVC de 100 mm
4 raios finos de bicicleta ou algum outro arame de aço.
Parafusos pequenos para madeira.
Parafusos pequenos com porca e arruela – utilizei parafusos para fixação de componentes em dissipadores de calor.
Cola de cianoacrilato – Super Bonder
Borracha de câmara de ar
Microcontrolador PIC 16f628 ou 16F84 com o respectivo gravador
Componentes eletrônicos diversos – veja esquema elétrico
Serra tico-tico com lâmina fina
3 servos para aeromodelo padrão FUTABA
Bateria de 9V para o circuito eletrônico
4 pilhas AA para alimentação dos servos
Chave liga-desliga com dois pólos
Lixas diversas
Furadeira com brocas finas para metal/madeira
Duas micro chaves dessas encontradas facilmente em mouse de computador.
Montagem do chassi:
Essa é a parte mais inovadora, pois vamos utilizar o PVC do cano para montar o chassi do robô.
Em primeiro lugar devemos cortar o cano em um comprimento que caiba no forno de casa. Depois devemos fazer um corte longitudinal conforme foto abaixo.

O segredo da técnica de planificação do cano consiste em aquecer o mesmo no forno até que fique mole e depois prensá-lo entre duas placas de madeira até esfriar. O forno deve estar na temperatura BAIXA e o cano jamais deve ficar em contato com a chama e o corte longitudinal deverá ser colocado para cima. O processo de aquecimento deve durar em torno de 10 a 20 minutos dependendo do forno. Para retirar o cano aquecido utilize um alicate ou algum outro tipo de pinça. O cano estará no ponto de ser retirado do forno quando espontaneamente se abrir e ficar com a consistência de um pedaço de couro. Em seguida deverá ser prensado entre as chapas de madeira, pois o resfriamento é muito rápido, portanto, as chapas de madeira devem ficar posicionadas próximas do forno.
Processo de corte
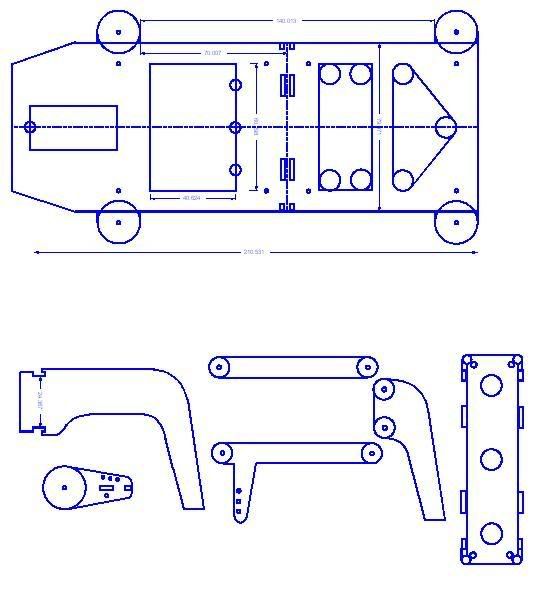
Devemos imprimir o esquema do chassi e colar em cima da chapa de PVC. O corte deverá ser feito pelo contorno do desenho com uma serra tico-tico com lâmina bem fina e com o máximo de cuidado.

link para a imagem ampliada
http://i158.photobucket.com/albums/t115/marcprofessor/INSETO.jpg
A qualidade da montagem dependerá do corte das peças que deve ser preciso.
Montagem mecânica
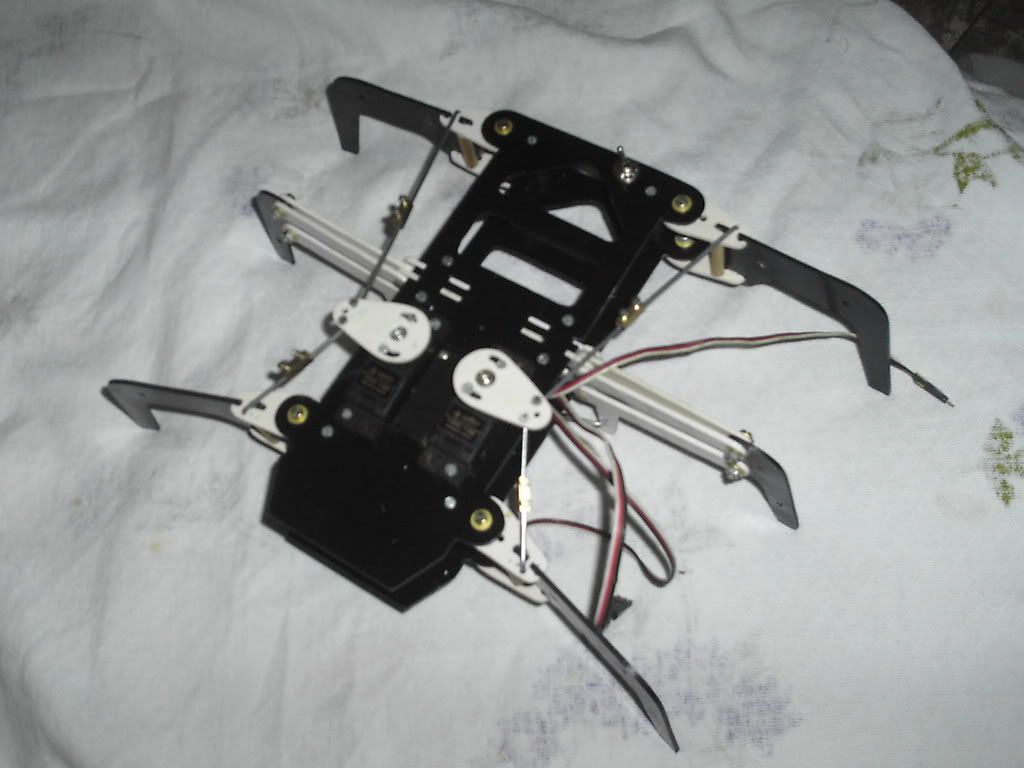
Abaixo estou colocando algumas fotos de todas as peças cortadas e devidamente acabadas Isso deve dar uma idéia da quantidade de peças necessárias para a montagem do robô.

Link para a imagem ampliada
http://i158.photobucket.com/albums/t115/marcprofessor/DCFC0010.jpg

link para a imagem ampliada
http://i158.photobucket.com/albums/t115/marcprofessor/DCFC0015-1.jpg
No site da Lynxmotion temos excelentes fotos com detalhes da montagem http://www.lynxmotion.com/images/html/build41a.htm
Para fixação das duas partes do chassi utilizei pedaços cilíndricos de madeira e parafusos. Cortei tiras de borracha de câmara de ar para colar na ponta das patas. Veja que a fita de borracha é colada em C de um lado a outro das patas.
A pintura das peças foi feita com tinta spray preta e as peças brancas estão na cor natural do PVC.
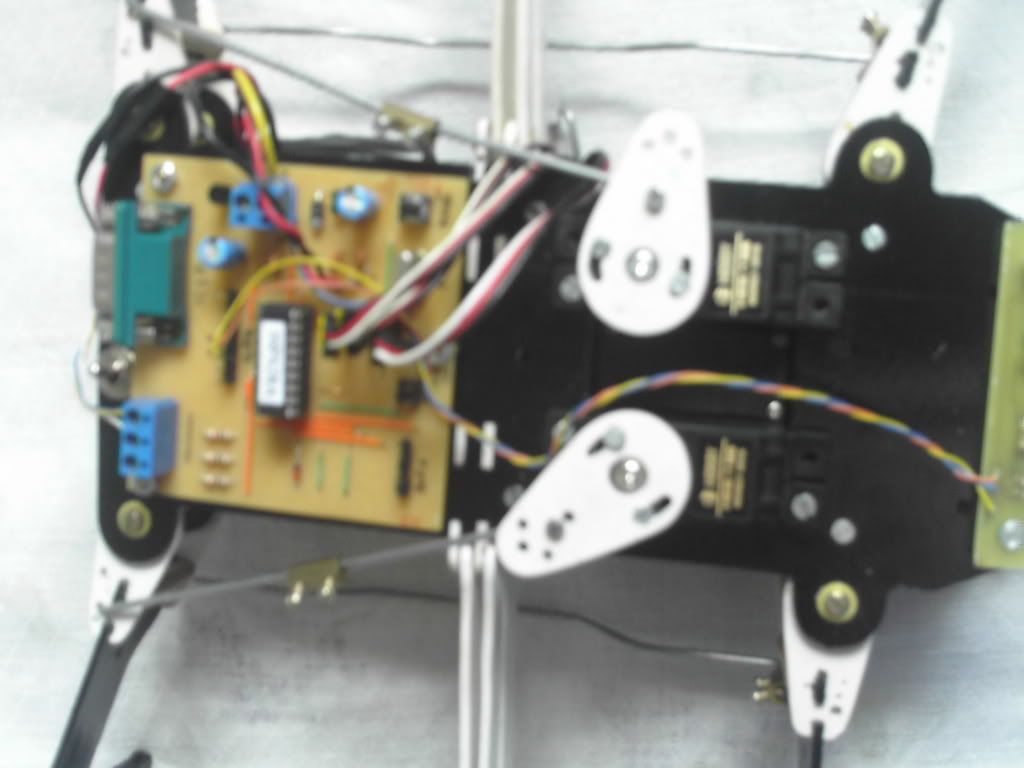
Montagem eletrônica.
Estou disponibilizando o opcode completo do robô hexapode escrito em BASIC do PIC BASIC PRO. O compilador pode ser conseguido na sua versão demo no site http://www.melabs.com
A linguagem BASIC foi escolhida por ser mais simples e atender os propósitos educacionais do projeto. Além do opcode estou disponibilizando também o arquivo hexadecimal para gravação direta do PIC.
http://dl1u.savefile.com/a1668a71e8c09f9ceec77bb8b52df194/hexapode.zip
Abaixo estou colocando o esquema elétrico do robô, que foi inspirado em outros projetos publicados na Internet e na revista Saber Eletrônica.
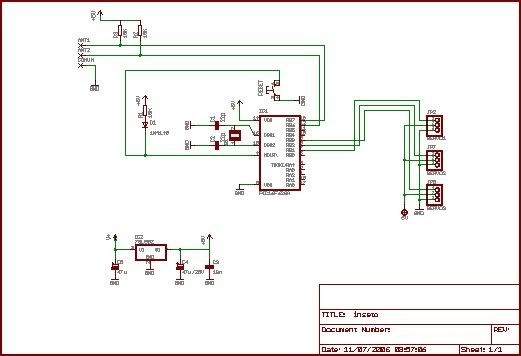
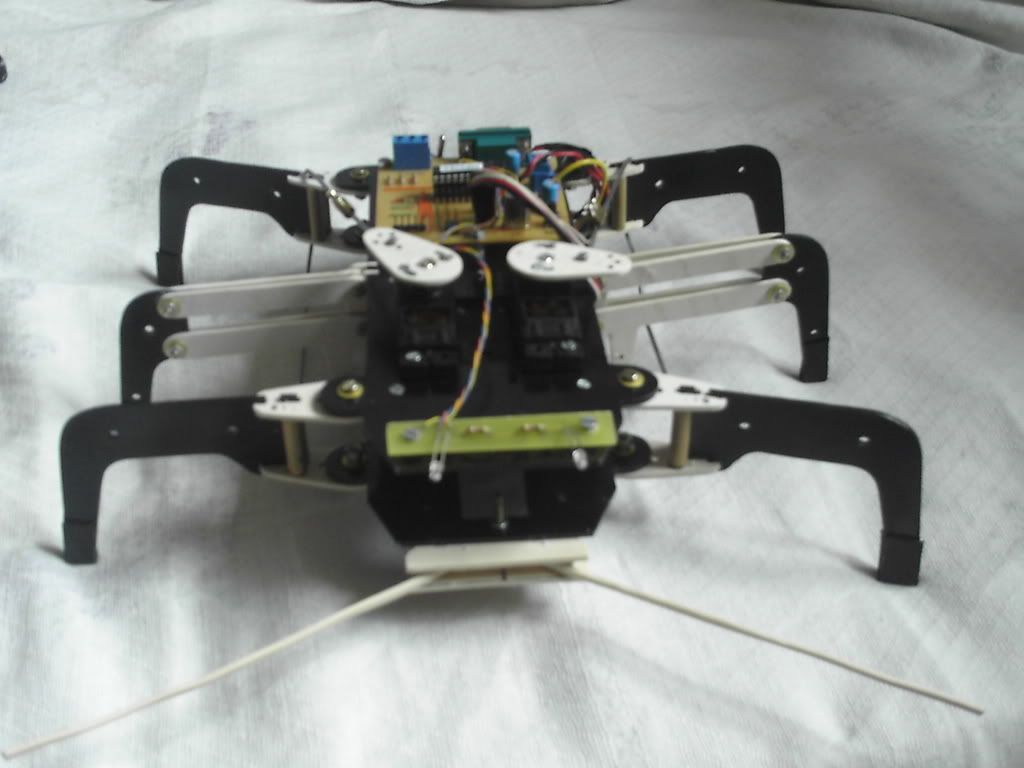
As antenas são construídas de tiras de PVC ou pedaços de arame e as micro chaves são retiradas de mouse de computador.
veja algumas fotos do robô pronto

Link para a imagem ampliada
http://i158.photobucket.com/albums/t115/marcprofessor/DCFC0001-1.jpg

Link para a imagem ampliada
http://i158.photobucket.com/albums/t115/marcprofessor/DCFC0003.jpg

Link para a imagem ampliada
http://i158.photobucket.com/albums/t115/marcprofessor/DCFC0006.jpg
A seguir estou colocando um link para o vídeo do robô em ação. Perdoem a qualidade do vídeo e a sonoplastia do choro do bebê. Hehehehe...
http://dl1u.savefile.com/5663afbc322b24dabdb1644e3a3398f2/DCFC0004.AVI
Um grande abraço.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}